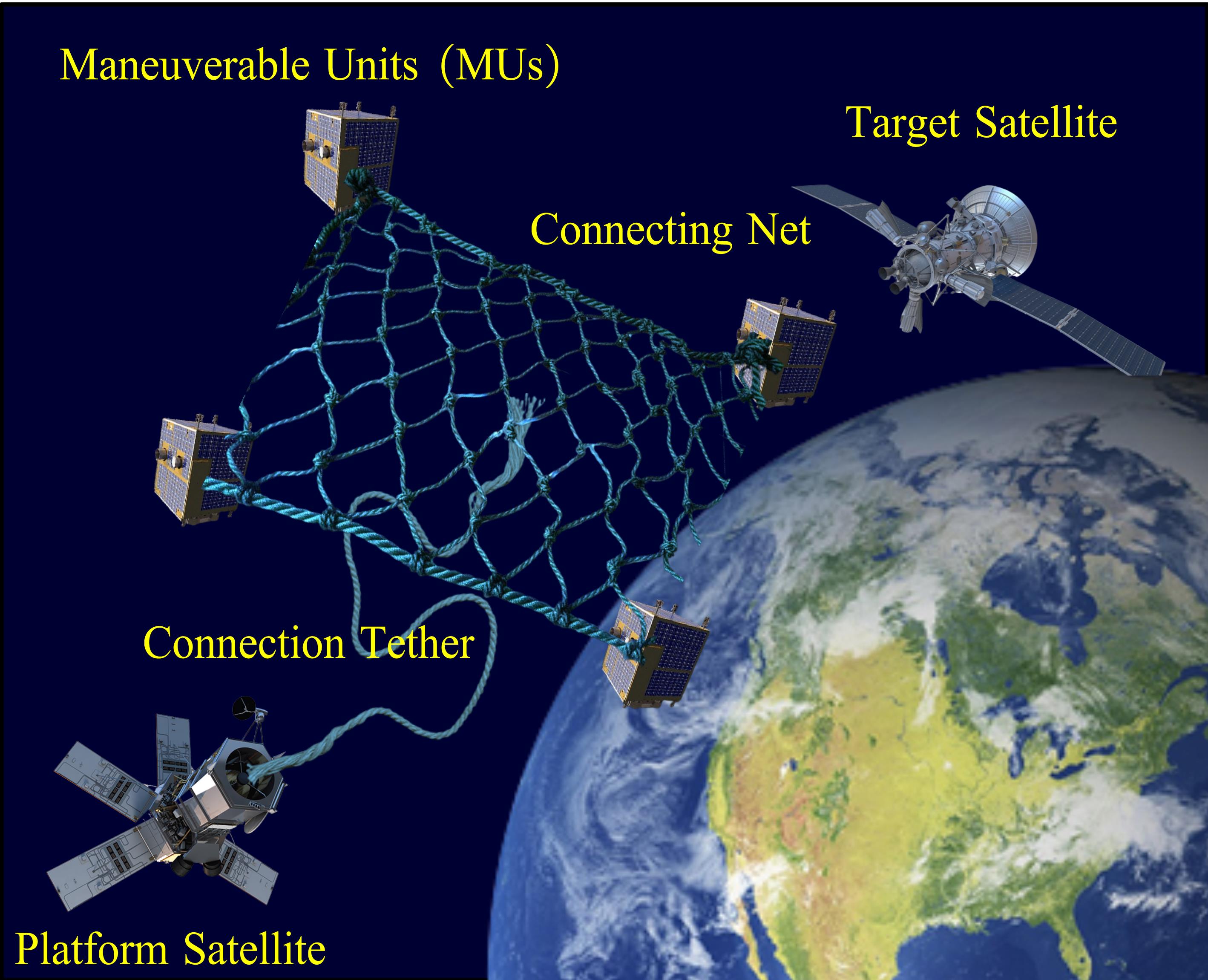
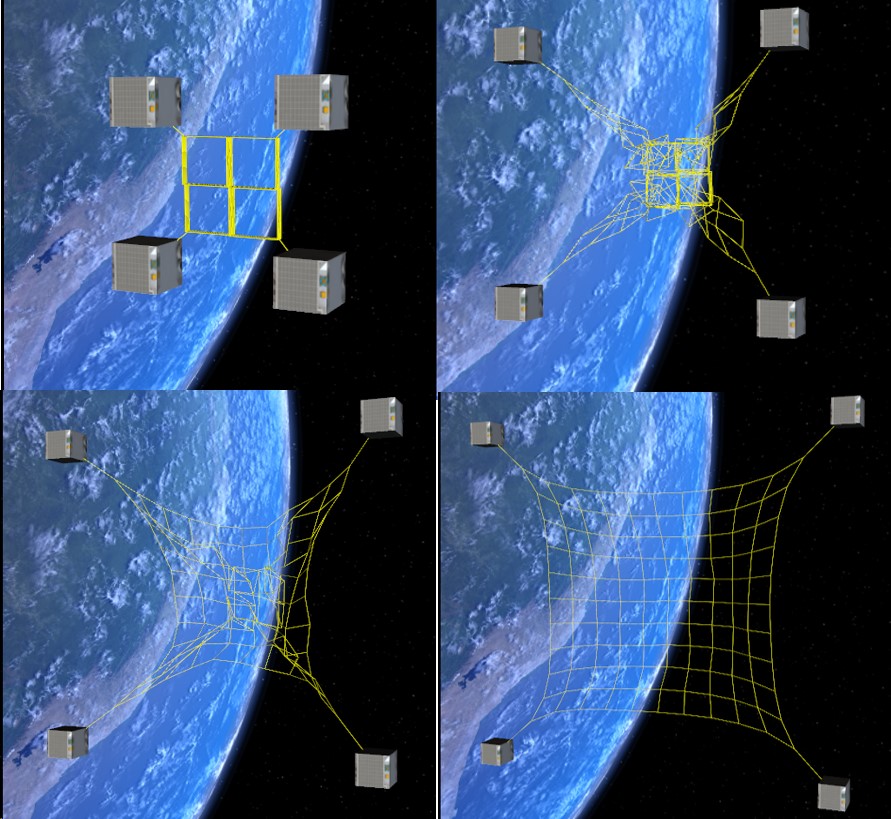
Research Game Theory based Control Method for Multi-Agent Systems Master Thesis Motion Planning and Control for Multi-UAV Cooperative Transportation Bachelor Thesis Engineering Configuration Planning and Control for Tethered Space Net Robot From Innovation Academy for Microsatellite of Chinese Academy of Sciences Ground-based Air Bearing Platform for Satellite Simulation From a Key Research and Development Programme of the National Natural Science Foundation of China